
Welcome to “160 Seconds”, the first levelof the “U-&-I-Robot-Dance-Challenge” 🙂
On this page you find all the necessary instructions for programming your robot.
We advise you to start with the first three sections of the “160 Seconds” choreography.
If you enjoyed doing that you can do even more and let your robot improvise in sections 4 and 5 !
We are happy about rolling, walking and jumping robots.
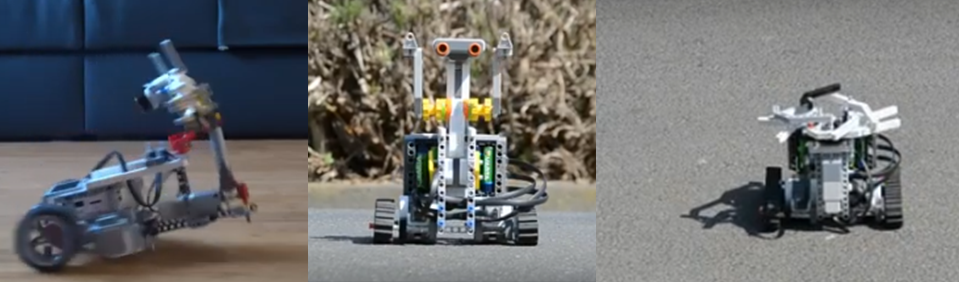
The normal idea of a flashmob is that different people come together to join in a dance. The same goes for this robotic flashmob. Any kinds of robots are allowed to take part. To be inspired please check our page with the videos of the first test robots 🙂
You can use commercially marketed robots of known brands such as
You can also participate with virtually any other kind of robot. We are expecially happy to get to know those robots you built or adapted yourself.
So show us what you can do with your own
- humanoids (on legs or on wheels)
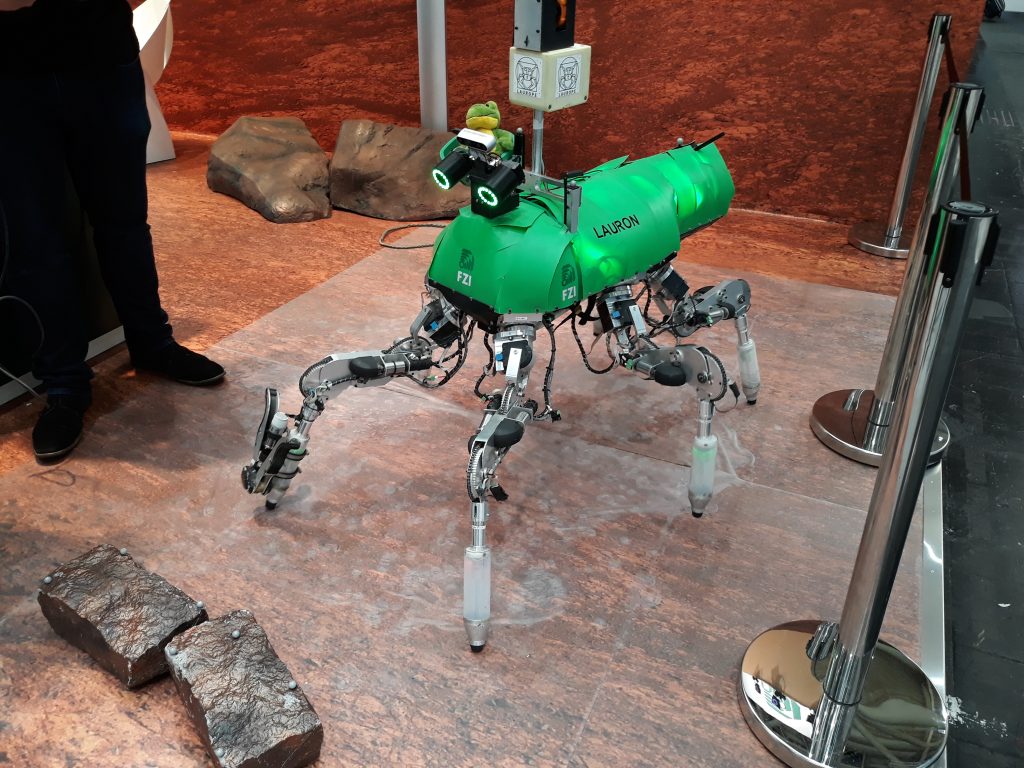
- canoids (four-legged robots)
- insectoids (six-legged robots)
- arachnoids (eight-legged robots)
- or drones.
Perhaps you work in a factory or have access to more sophisticated robots. Then we are also very curiuos to see what you can do with
- household robots (e.g.vacuum cleaners or lawnmowers)
- or even industrial robots.
Check the 5 sections
“160 seconds” is exactly as long as its title suggests and consists of 6 sections: a short introduction and two themes which are repeated with a variation and a finale. You can download the music here.

- Intro (steam pipe)
- Part 1 (theme 1 – metal hammers)
- Part 2 (theme 2 – shaking plastic)
- Part 3 (theme 1 metal hammers and a )
- Part 4 (theme 2 (shaking plastic)
- Finale
The intro and the finale are both exactly 16 seconds long.
Each of the following parts is 32 seconds long.
Part 1 and 2 require a special choreography. (At the end of this page you will find the precise choreographic descriptions for your robots.)
The Intro sounds like a steam pipe and prepares every robot.
Part 1 (Theme 1) has a sound of many metal hammers in fast rhythm.
Part 2 (Theme 2) adds an even more challenging sound sound of shaking plastic structures.
These 3 sections add up to excatly 80 seconds.
If programming seemed difficult you can either stop here or simply have your robot repeat part 1 and 2. If you had fun feel free to continue with the slightly advanced part.
Individual verses – Artistic Freedom
Theme 1 and Theme 2 are repeated as Part 3 and Part 4 with slight variations. Here the composer Christian Schaaf added more voices to create more exciting sounds.
This musical boost provides the perfect opportunity for you to show us your creativity in programming your robot. During these sections – again with 4 x 8 beats each – we are looking forward to a loooooot of creative programming. Show us what special tricks you were able to teach to your robots 🙂
Preparing your Robot Dance Floor
Each robot dances on his own “Robot Dance Floor” (RDF) which you set up at home. We suggest a square with at least 5 times the width of your robot.
So if your robot has a base of 30 cm the square should measure 150 c, x 150 cm. If you have a smaller robot only 10 cm wide or long, the RDF should be 50 cm x 50 cm.
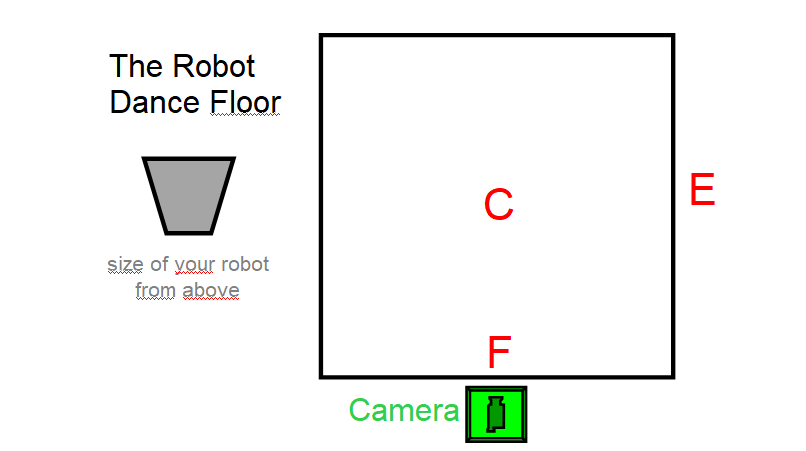
As you can see there are 3 important points on the dance-floor:
- Point C (center)
- Point E (entrance)
- Point F (front)
Point C is the perfect center of the dancefloor. When standing on point C your robot should be clearly visible in the camera as a whole figure, also if it raises its arms or antennas.
Point E is the entrance or the starting point on the left side of your dance floor. When standing on point E your robot should be just outside the way camera angle on the left.
Point F is the front of the stage. When standing on point F only your robot’s face should fill the whole picture of the camera.
Make sure you have a neutral background and floor. We suggest you to use a unicolor bedcloth or large towel contrasting with the color of your robot.
Preparing the camera
While the robot dances you have do do a video with your camera. The camera should capture the whole width of the RDF.
The lense of your camera should be as high as your robots “face” so the robot can move close to the camera for the “close up selfie”. 🙂
Please do not move the camera around when your robot dances and do not zoom in or out with your camera. The best way for us to check how well you programmed your robot is this calm camera.
In order to have the best possible material we suggest to put the camera on a tripod.
Send us your Video !
We are looking forward to people taking our Robot Dance Challenge at any given time. Feel free to put the video on a platform (e.g. youtube or vimeo) where everyone can watch it easily and send us the link to robotic-dance@kreissig.net.
It may be addedto our favorite videos on our dance example page and if you grant us the permission we can also include it on our official Youtube-channel. 🙂
Partners and Collaborators
“160 Seconds” is short version of “600 Seconds”. Both pieces were composed by the Swiss composer Christian Schaaf. In 1990 “600 Seconds” was created especially for a highly acrobatic pas de deux TeeKay choreographed for the Hannover Ballet, Germany.
This Pas de Deux was extended into a Pas de Six with the title “Digits 1” performed by Malmö Ballet, Sweden. In 1991 an even more elaborated version “Digits 2” was presented at the International Choreographic competition in Tokyo.
If you would like to learn more about amazing combinations of arts and sciences just click here. 🙂
Have a great day and stay safe and healthy in these crazy corona times !
This website is continuously improved. The last time this specific subpage has been updated was April 20th 2020. In case you are able to spot any typos or a blocked link, please do not hesitate and let us know by sending an email to regie(at)kreissig(dot)net including a link of the specific subsite. I appreciate your feedback and hope you will have a wonderful day :- )
Return to the landing page