

Herzlich Willkommen auf der Erklärungsseite von U&I-Robotic-Dance, dem ersten Flashmob Projekt für Roboter. Hier findet ihr alle Infos für unsere erste Robot-Dance-Challenge mit dem Titel “600 Seconds”.
Wer darf mitmachen?
Wie auch bei den Live-Events freuen wir uns über die Teilnahme von Roboter begeisterten Personen. Ihr könnt als Einzelpersonen mitmachen, als Familien, als Roboter AG an einer Schule oder auch als Programmierer von Robotern im Industriesektor.
Ihr müsst Eurem jeweiligen Roboter nur die ersten 3 Abschnitte der „600 Seconds“ Choreographie beibringen.
Ist Euch das gelungen sind Eurer Phantasie eigentlich keine Grenzen gesetzt. Wir freuen und über jedes Video eines im Takt der Musik rollenden, tanzenden, krabbelnden, hüpfenden, blinkenden oder kopfstehenden Roboter. Einige der ersten Versuche mit kurzen Erklärungen dazu findet ihr auf unserer Roboter-Tanz-Beispielseite. (Die kurzen Kommentare dort sind derzeit nur auf Englisch, aber sehr leicht zu verstehen)
Da es eine Flashmob für Roboter ist, schliessen wir keine Roboter aus. Ihr könnt gerne Eure gekauften Roboter nutzen, wie z.B.
- mbot (von makeblock)
- ozobot
- sphero
- dash and dot
- oder auch die vielen Roboter von Lego wie z.B. Mindstorm
Vor allem freuen wir uns über komplett selbstgebaute Roboter oder spannend adaptierte Modelle. Zeigt uns Eure
- Humanoiden (mit 2 Beinen oder auf Rädern)
- Canoiden (vierbeinige, hundeähnliche Roboter)
- Insektoiden (sechsbeinige)
- Arachnoiden (achtbeinige)
- auch Würmer und rollende Kugeln sind OK
- und natürlich auch Eure Drohnen!
Auch Menschen, die in einer Firma selber Industrieroboter programmieren können mitmachen und sogar ein Staubsaugerroboter, der die Choreographie gelernt hat, ist ein gern gesehener Mittänzer 🙂
Welche musikalischen Abschnitte gibt es?
Der ganze „600 Seconds“ Tanz besteht aus 3 Abschnitten: einem kurzen Intro und zwei sich abwechselnden Themen:
- Intro (Dampfgeräusche)
- Thema 1 (Metallhämmer)
- Thema 2 (Plastikgeräusche)
Das Intro ist genau 16 Sekunden alng und jedes der Themen genau 32 Sekunden. Das Intro hört sich an als ob Dampf aus einem Ventil austritt. Es dient als „Aufwärmphase“ für die Roboter. Thema 1 hat einen Grundrhythmus mit verschiedenen Metallhämmern, Thema 2 einen drübergelagerten Plastiksound.
Am Ende dieser Seite befindet sich eine genaue Beschreibung der Choreographie für die ersten 80 Sekunden (1:20 min) des Projekts.
Tänzerische Improvisation
Im Anschluss werden die beiden Themen einfach gelooped. Damit bieten wir Euch die Möglichkeit, mit Euren Robotern eigene Raummuster und komplexere Bewegungen auszuprobieren.
Wir freuen uns auf Eure kreativen Ideen und Fortsetzungen.
Zeigt uns die spannendsten Tricks, die ihr Euren Roboter ausführen lassen könnt. Achtet aber bitte darauf, dass sie nicht zufällig irgendwann passieren, sondern orientiert Euch am Rhythmus und den Höhepunkten der Musik. 🙂
Bereitet Tanzfläche und Kamera vor
Jeder Roboter hat seine eigene Tanzfläche: den “Robot Dance Floor” (RDF). Wir schlagen dazu ein Quadrat mit einer Seitenlänge der 5-fachen Breite Eures Roboter vor. Falls Euer Roboter eine Breite von 20 cm hat, würde das Quadrat 100 cm x 100 cm betragen.
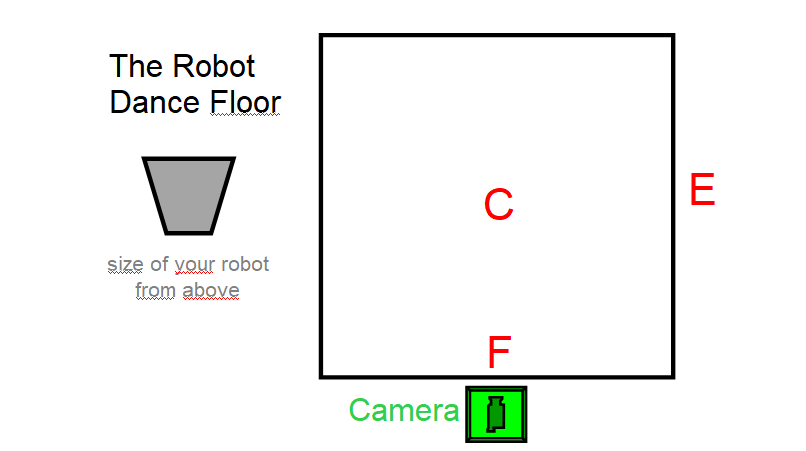
Es gibt 3 wichtige Punkte auf dem RDF:
- C (für Center bzw Mitte)
- E (für Entrance bzw Eingang)
- F (für Front)
Punkt C is t die perfekte Mitte Eurer Tanzfläche. Wenn Euer Roboter dort steht, sollte er ganz zu sehen sein, auch wenn er eventuell vorhandene Arme, Fühler oder ähnliches nach oben hebt.
Punkt E ist der Auftrittsort Eures Roboters auf der rechten Seite des DRF von der Kmera aus betrachtet. Wenn Euer Roboter dort steht sollte er nicht mehr von der Kamera erfasst weden.
Punkt F is der Mittelpunkt der Front des RDF. Wenn Euer Roboter dort steht, sollte sein „Gesicht“ das ganze Kamerabild ausfüllen. Wir nennen das deshalb auch den „Robot-Selfie-Point“.
Sorgt für einen möglichst einfarbigen Hintergrund, vor dem sich Euer Roboter gut abhebt. Gerne auch in einer knalligen Farbe.
Das Video aufnehmen
Eure Kamera sollte die gesamte Tanzfläche aufnehmen. Die Linse Eures Smartphones sollte dabei auf der Höhe des Gesichts Eures Roboters sein, damit das „Robot Selfie” besonders gut wird. 🙂
Bewegt Eure bei der Aufnahme Kamera nicht. Falls möglich nutzt ein Stativ oder legt das Handy irgendwo stabil ab.
Lasst die Musik laufen und nehmt zunächst die ersten 80 Sekunden als MP4 Format auf. Wenn Ihr damit zufrieden seid, schickt uns das Video zu oder auch einen Link. Mit etwas Glück setzen wir es dann auf unsere Seite mit den Tanzbeispielen. Die Mailadresse lautet robotic-dance@kreissig.net
Mit dem Übermitteln des Videos an uns erlaubt ihr uns die unentgeltliche Nutzung Eures Materials.
Choreographische Erklärungen
Nun kommen wir zur eigentlichen Choreographie, die wir zur besseren Übersicht in eine Tabelle gepackt haben.
In der ersten Spalte sind kurze Hinweise zur Musik enthalten, in der zweiten Spalte das genaue Timing in Minuten und Sekunden.
Spalte 3 enthät die sogenannten „Counts“, also die Art und Weise wie Tänzer auf der ganzen Welt diese Musik zählen würden. Die meisten Stücke sind in Phrasen von jeweils 8 Schlägen teilbar.
Tänzer zähen die jeweilige 1 als GROSSE Zahl, um sich gemeinsam zu koordinieren:
- EINS-2-3-4-5-6-7-8
- ZWEI-2-3-4-5-6-7-8,
- DREI-2-3-4-5-6-7-8
- VIER-2-3-4-5-6-7-8.
Spalte 4 beschreibt die zu tanzenden Bewegungen. Es könnte sinnvoll sein, Euch diese Tabelle auszudrucken.
| Abschnitt des Tanzes | Zeit | Counts | Bewegungen |
| Intro (steam pipe rising) | 00:00 | 4 x 8 | Roboter bewegt sich von Punkt E zu Punkt C (Bildmitte) – gerne laufend, krabbelnd, rollend etc |
| Thema 1 (Metallhämmer) | 00:16 | 2 x 8 | „Hello World“: Rob reckt sich so hoch wie möglich (Arm oder Fühler können gerne winken), wer Lust hat kann auch „pumpende Bewegungen“ versuchen |
| 00:24 | 2 x 8 | Rob macht sich so klein wie möglich (gerne dabei auch wier „pumpen“ | |
| 00:32 | 2 x 8 | „Diagonal“: Roboter neigt sich so weit wie möglich nach links, und/oder hebt nur den rechten Arm | |
| 00:40 | 2 x 8 | Roboter neigt sich so weit wie möglich nach rechts, oder hebt nur den linken Arm | |
| Thema 2 – Plastik | 00:48 | 2 x 8 | „Drehen“ Rob dreht sich so schnell wie möglich im Uhrzeigersinn (nach rechts) um die eigene Achse |
| 00:56 | 2 x 8 | Rob dreht sich so schnell wie möglich gegen den Uhrzeigersinn (nach links) um die eigene Achse | |
| 01:04 | 2 x 8 | „Robot Selfie“ Roboter bewegt sich auf Kamera zu, so nahe wie möglich – er schaut quasi in die Linse hinein | |
| 01:12 | 2 x 8 | zurück zu Punkt C |
Jetzt habt ihr alle Bewegungen der ersten 80 Sekunden.
Steps for successful participation
Send us your Video !
- download the music
- program you robot to execute the required movements in the correct timing of the song
- make a video of your dancing robot
- if you want to officially participate, don’t forget to apply
- upload the video
Beteiligte Künstler*innen
“600 Seconds” was composed by the Swiss composer Christian Schaaf in 1990. He created is especially for a highly acrobatic Pas de Deux TeeKay Kreissig choreographed for the Hannover Ballet, Germany.
This Pas de Deux was extended into a Pas de Six with the title “Digits 1” performed by Malmö Ballet, Sweden. In 991 an even more elaborated version “Digits 2” was presented at the International Choreographic competition in Tokyo.
The logo for Robotic Dance was designed by Anika Caumanns.
This website is continuously improved. The last time this specific subpage has been updated was April 20th 2020. In case you are able to spot any typos or a blocked link, please do not hesitate and let us know by sending an email to regie(at)kreissig(dot)net including a link of the specific subsite. I appreciate your feedback and hope you will have a wonderful day :- )